画像処理装置にはFVX基本パック ver2.50以降及びFVXファースト標準ビデオPACK ver2.50以降がインストールされている必要があります。
本サンプルプログラムは、放射状エッジ検出にて円中心座標からの最遠点と最短点を計測します。
放射線エッジ検出にて検出されたエッジ点群に対して、円のロバスト推定を行って半径と中心を求めます。
その後、求められた円中心から、最遠・最短の点を算出し、その距離を表示します。
FvxDisplayEx, FvxImage, FvxFileAccess, FvxPerformanceCounter, FvxROI, FvxCalcData, FvxEdge, FvxVideo
画像処理装置にはFVX基本パック ver2.50以降及びFVXファースト標準ビデオPACK ver2.50以降がインストールされている必要があります。
カメラから画像を取り込みます。カメラ取込が不可能な場合は灰色で表示されます。
画像ファイルを読み込みます。読み込む画像はサイズが512*480の濃淡画像にしてください。
表示中の濃淡画像をファイルに保存します。
エッジの極性を指定します。
検出直線のどちら側から走査を行うか指定します。
エッジとして検出する位置を指定します。
最大点 : 検出線上で微分値が最大となる点をエッジとして出力します。
最初の点 : 検出線を走査して行き、微分値が最初に閾値を越えた点をエッジとして出力します。
エッジ検出閾値を指定します。 0〜100 の間で設定してください
検出ラインに対して、垂直な方向に濃度投影を取るための計測ラインの片幅を指定します。 0以上の値を設定してください。
放射線状に引くエッジ検出線を何本にするか設定します。
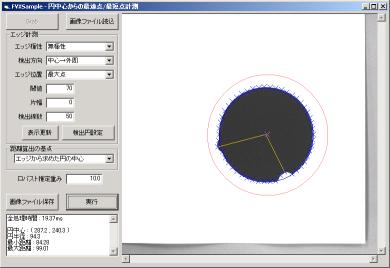
検出円の中心からの最小・最大距離、もしくは、エッジ点からロバスト推定をして求めた円の中心からの最大・最小距離の、どちらを見つけるかを設定します。
エッジ検出とロバスト推定を実行後、最小・最大距離を見つけます。
検出されたエッジと、求められた円は画面上に青で表示されます。また、右下のテキストボックスには、処理時間とロバスト推定された円の中心座標及び半径、最大・最小距離が表示されます。
本サンプルプログラムを使用する際には、使用許諾事項を必ずお読み下さい。