画像処理装置にはFVX基本パック ver2.50以降及びFVXファースト標準ビデオPACK ver2.50以降がインストールされている必要があります。
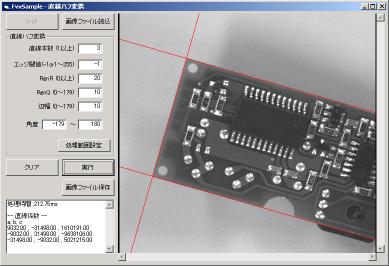
本サンプルプログラムはハフ変換により、直線検出を行います。
FvxDisplayEx, FvxImage, FvxFileAccess, FvxPerformanceCounter, FvxROI, FvxVideo, FvxHoughLine
画像処理装置にはFVX基本パック ver2.50以降及びFVXファースト標準ビデオPACK ver2.50以降がインストールされている必要があります。
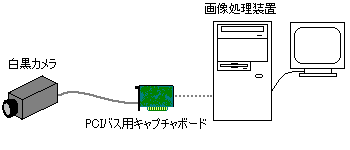
カメラから画像を取り込みます。カメラ取込が不可能な場合は灰色で表示されます。
画像ファイルを読み込みます。読み込む画像はサイズが512*480の濃淡画像にしてください。
表示中の濃淡画像をファイルに保存します。
検出したい直線の本数を設定します。
1以上の数を設定してください。
エッジ点と判定するための閾値を設定します。 -1 または 1〜255 の範囲で設定してください。
-1を設定すると、閾値が自動決定され、エッジ点が抽出されます。
似たような直線を検出しないようにするためのパラメータ(距離)を設定します。
0以上の数を設定してください。
似たような直線を検出しないようにするためのパラメータ(傾き)を設定します。
0〜179の範囲で設定してください。
ハフ空間における投票の角度の範囲の片幅を設定します。
0〜179の範囲で設定してください。
直線検出の対象となる角度範囲を指定します。単位は度です。
次式を満たすように指定して下さい。
-360 ≦ (始点角度) ≦ 360, 0 ≦ (終点角度) ≦ 360
(始点角度) ≦ (終点角度), (終点角度) - (始点角度) < 360
ハフ変換処理を行う領域を指定します。
実行結果を消去します。
ハフ変換による直線検出を実行します。
本サンプルプログラムを使用する際には、使用許諾事項を必ずお読み下さい。