画像処理装置にはWIL Ver 3.0.0.0以降がインストールされている必要があります。
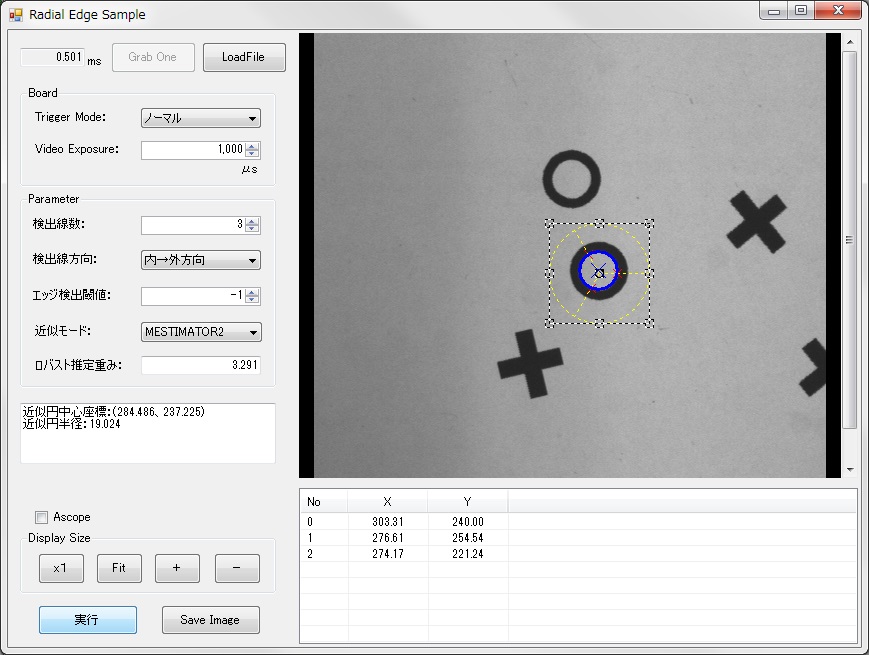
本サンプルプログラムは、円形ワークのエッジを見つけ、その半径と中心を求めます。
FVIL.Video, FVIL.Data, FVIL.Edge, FVIL.CG, FVIL.CFviTimeCounter, FVIL.File
画像処理装置にはWIL Ver 3.0.0.0以降がインストールされている必要があります。
カメラから画像を取り込みます。画像取り込みが完了するか、エラーが発生するまで待機します。
画像ファイルを読み込みます。読み込む画像は濃淡画像にしてください。
画面上に画像の濃度投影グラフを表示します。
エッジ検出と点群からの円近似を実行します。
実行後、検出したエッジは赤い十字で、近似円は青い円で、近似円の中心は青い十字で表示されます。
エッジ検出を行う直線です。
マウス操作にて検出したい場所に移動してください。
円の中心放射上を走査し、黄色直線ライン上のエッジを検出します。
表示中の画像をファイルに保存します。
トリガモードの設定を行います。
ノーマル/内部トリガ/外部トリガ の3つから選択します。
露光時間の設定を行います。
1〜3276750μsの範囲で指定してください。
検出線の本数の設定を行います。
許容値:3以上3600以下
検出線の方向の設定を行います。
内→外方向/外→内方向 の2つから選択します。
エッジ検出の閾値の設定を行います。
-1を設定すると、閾値が自動決定され、エッジ点が抽出されます。
許容値:-1以上255以下
近時計算手法の設定を行います。
MESTIMATOR/RANSAC/LMEDS/MESTIMATOR2/LMEDS2/LSM/LSM_FAST の7つから選択します。
ロバスト推定法の最適化パラメータの設定を行います。
この値は近似モードによってパラメータの意味が異なります。
等倍表示にします。
画像が画像表示領域内いっぱいに拡大されるよう、表示倍率を変更します。
表示倍率を0.5プラスします。
表示倍率を0.5マイナスします。
画面上に画像の濃度投影グラフを表示します。
FVILを使用する場合
・.NET Framework 2.0 (SP2)のいずれかが必要です。
本サンプルプログラムを使用する場合は、GAC への登録が必要になります。
※GAC への登録の詳細は、WIL説明書の環境設定を参照してください。
本サンプルプログラムを使用する際には、使用許諾事項を必ずお読みください。