画像処理装置にはWIL Ver 3.0.0.0以降がインストールされている必要があります。
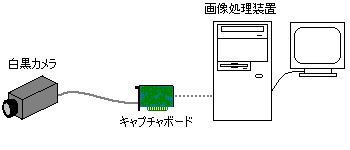
本サンプルプログラムは、直線ハフ検出を行います。
FVILbasic, FVILforms, FVILdevice
画像処理装置にはWIL Ver 3.0.0.0以降がインストールされている必要があります。
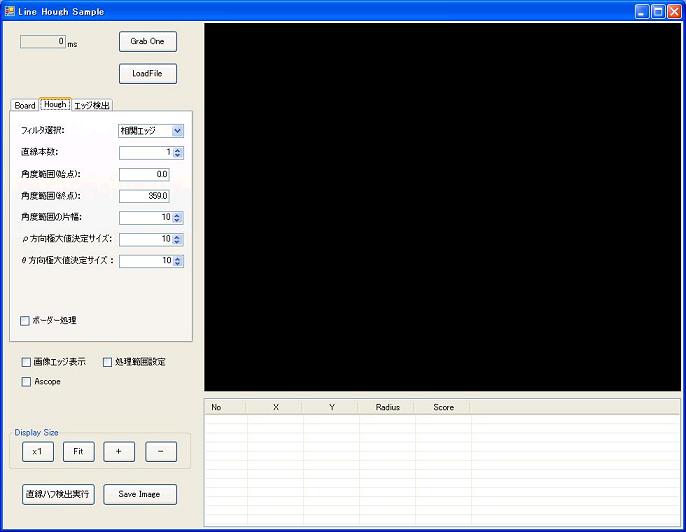
カメラから画像を取り込みます。画像取り込みが完了するか、エラーが発生するまで待機します。
画像ファイルを読み込みます。読み込む画像は濃淡画像にしてください。
表示中の画像のエッジ表示を行います。
画面上に画像の濃度投影グラフを表示します。
画像処理を行う際の範囲を設定します。
直線ハフ検出を実行します。
実行後、検出結果は赤い直線で表示されます。
表示中の画像をファイルに保存します。
トリガモードの設定をします。
ノーマル/内部トリガ/外部トリガ の3つから選択します。
露光時間の設定を行います。
1〜3276750μsの範囲で指定してください。
エッジ抽出の為のフィルタ処理方法を選択します。
相関エッジ/ソーベル の2つから選択します。
・相関エッジフィルタ
局所領域内の関数曲線(シグモイド関数)と濃度分布の一致度を計測するフィルタです。
この一致度をエッジ強度としています。
・ソーベルフィルタ
ソーベルフィルタをかけてエッジを検出する方法です。
直線ハフ検出によって得られる直線本数の上限の設定を行います。
許容値:1以上
検出する直線の法線方向の角度(始点)の設定を行います。
許容値:-360以上360以下
検出する直線の法線方向の角度(終点)の設定を行います。
許容値:-0以上360以下
※角度範囲の始点と終点は、以下の条件を満たす必要が有ります。
始点 ≦ 終点
終点 − 始点 < 360
ハフ空間における投票の角度範囲の片幅の取得または設定を行います。
許容値:0以上179以下
ρ方向極大値決定サイズの設定を行います。
許容値:0以上
θ方向極大値決定サイズの設定を行います。
許容値:0以上
エッジ作成時のボーダー処理を実行するか否かを示すフラグの設定を行います。
エッジ強度値に対する閾値の設定を行います。
非極大抑制処理のフィルタ片幅の設定を行います。
横方向の局所領域サイズの設定を行います。
許容値:3以上255以下の奇数
縦方向の局所領域サイズの設定を行います。
許容値:1以上15以下の奇数
シグモイド関数のパラメータ k の設定を行います。
この値は、関数曲線の形状を決めるパラメータです。
分散閾値の設定を行います。
許容値:1以上16384以下
等倍表示にします。
画像が画像表示領域内いっぱいに拡大されるよう、表示倍率を変更します。
表示倍率を0.5プラスします。
表示倍率を0.5マイナスします。
画面上に画像の濃度投影グラフを表示します。
FVILを使用する場合
・.NET Framework 2.0 (SP2)のいずれかが必要です。
本サンプルプログラムを使用する場合は、GAC への登録が必要になります。
※GAC への登録の詳細は、WIL説明書の環境設定を参照してください。
本サンプルプログラムを使用する際には、使用許諾事項を必ずお読みください。